Drexel University - Senior Design
Skewed-Rotary-Plane Humanoid Robot Spine Joint
The Purpose
Humanoid robotics research focuses on the development of andromorphic robots that can interact with humans and function within human environments (e.g. homes, businesses, manufacturing, etc.). Most human motions (e.g. walking, running, stretching, throwing, carrying and manipulating objects, etc.) involve the coordination of many joints and muscle groups throughout the human body and thus humanoid robots must have comparable flexibility and adequate sensing and processing faculties to perform such motions.
Humanoid robot systems are often simplified to use the fewest possible number of joints to perform human motions (redundant joints are generally eliminated), which limits the overall flexibility of such systems.
Humanoid robot systems are often simplified to use the fewest possible number of joints to perform human motions (redundant joints are generally eliminated), which limits the overall flexibility of such systems.
The Key to Full-Body Motion
|
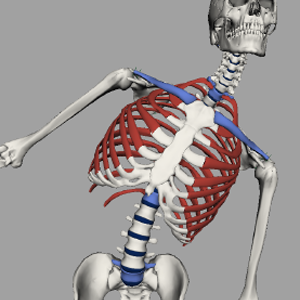
The kinematic importance of the human spine connects the upper torso to the lower torso and legs. This provides flexibility for movement, yet still allows upper and lower bodies to move independently
Challenges of implementation
|
|
Design Constraints
- Flexibility/range of motion – The spinal joint must have the ability to express roll, pitch, and yaw of the Hubo upper torso within a reasonable range of motion (+/- 30° on all axes).
- Weight constraints – The spinal joint must be light enough for the Hubo to carry as additional payload (no more than 10 lbs.).
- Size constraints – The spinal joint must fit within the cross-section of the body.
- Stability/rigidity – The spinal joint must be able to hold the position of the body when not in use.
- Ease of implementation – The spinal joint must easily integrate into the current Hubo design and not alter the placement of key components.
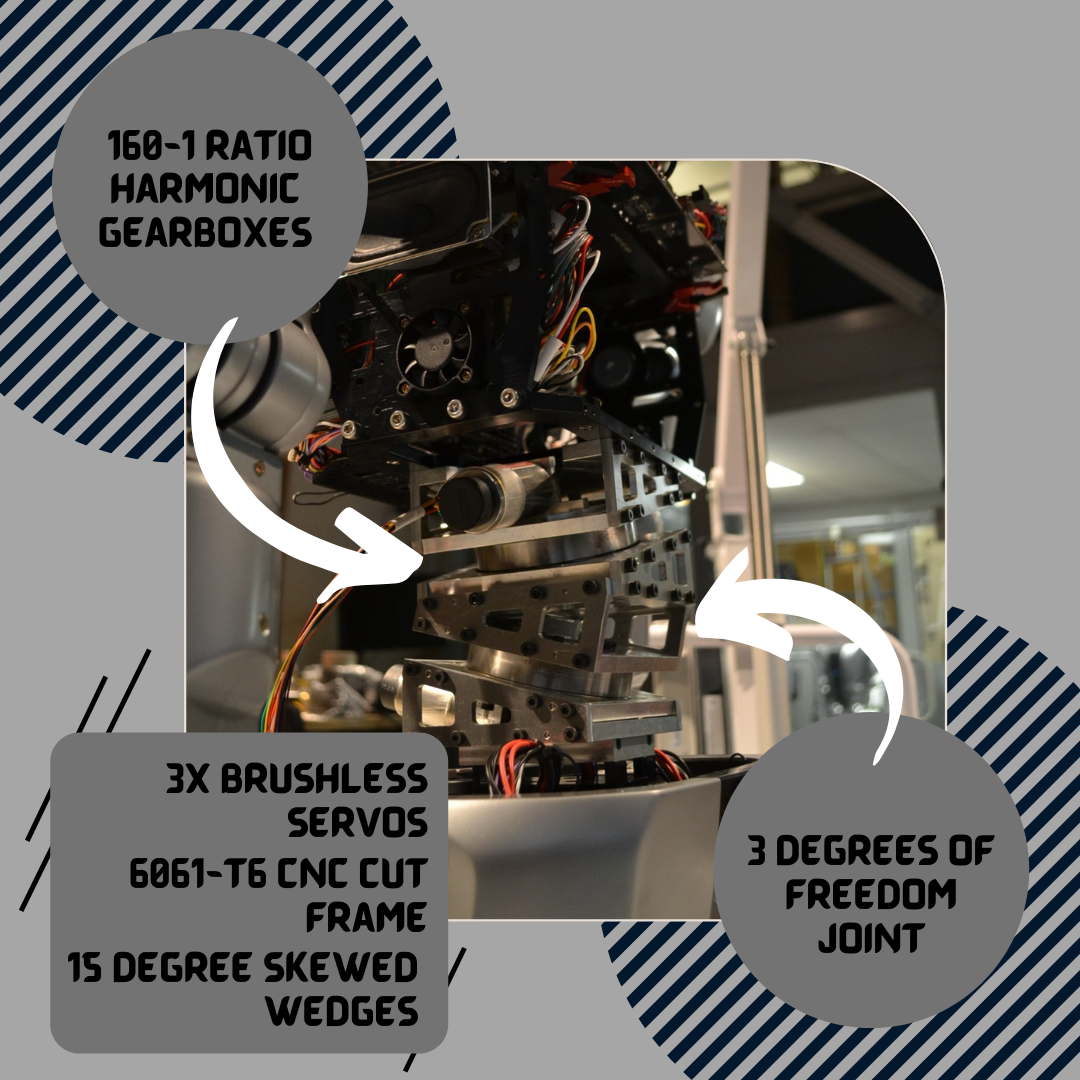
Design Solution
|
|
Skewed-Plane Rotary Disc Design
|

|