Korean Advanced Institute of Science and Technology (KAIST) - Hubo Lab
|
|
RJ traveled to South Korea for a six month co-op working at the prestigious Hubo Lab at KAIST. RJ was also the first of many Drexel Co-Ops to work at this laboratory. He was tasked to convert over 1000 AutoCAD files into 3D Parametric files. These CAD models where later used in our Online Hubo and robotic simulations.
During this time he was also training in the manufacturing of the robotic platform. He was taught to use MasterCAM and how to Operate the CNC machine. He later used this knowledge to machine operational replacement parts at Drexel. |
|
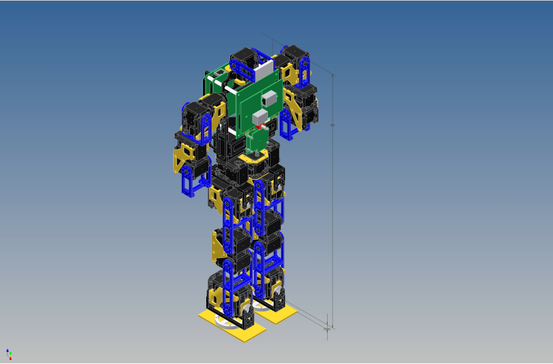
Toward the end of his Co-Op he designed Drexel's first Humanoid robot ATLAS. This robot was designed for a "running" competition for the 2009 Robo Games in San Francisco California. The Robot featured a CAN bus controlled servo network, force feed back sensors in the feet, and onboard computer system. All parts where machined by RJ at Hubo Lab and shipped to the US for assembly & programming.
See video below about the manufacturing process and the kinematic motion planning. |